
Aaron, Kun ZHANG
Resume:[cv]
Email: kun.zhang [at] connect[dot]ust [dot] hk
Research Interests:
Robotics Perception, Manipulation, & Mechatronic System Design
|
Aaron, Kun ZHANGResume:[cv] Email: kun.zhang [at] connect[dot]ust [dot] hk Research Interests: Robotics Perception, Manipulation, & Mechatronic System Design |

|

|
|
“利而不害,为而不争”
|
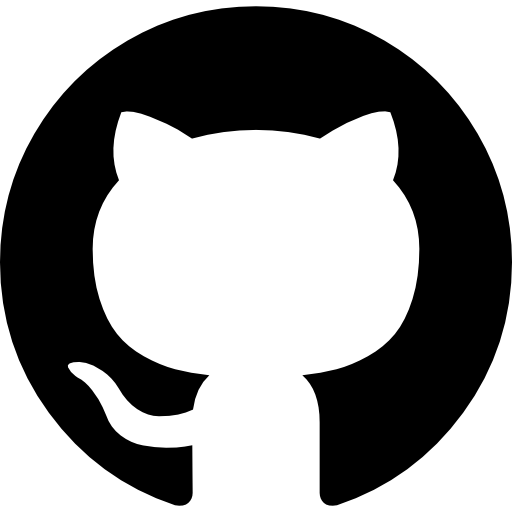
SLAM
[2023.01-2023.05] -DORF, IEEE Robotics and Automation Letters (RAL),2023 [paper] -TNDF, IEEE Robotics and Automation Letters (RAL),2024 [paper] |
|
Design and Test of A Novel Modular Dexterous Gripper
[2022.10-2023.03] -IEEE International Conference on Automation Science and Engineering(CASE),2023 [Paper] [Patent] |
|
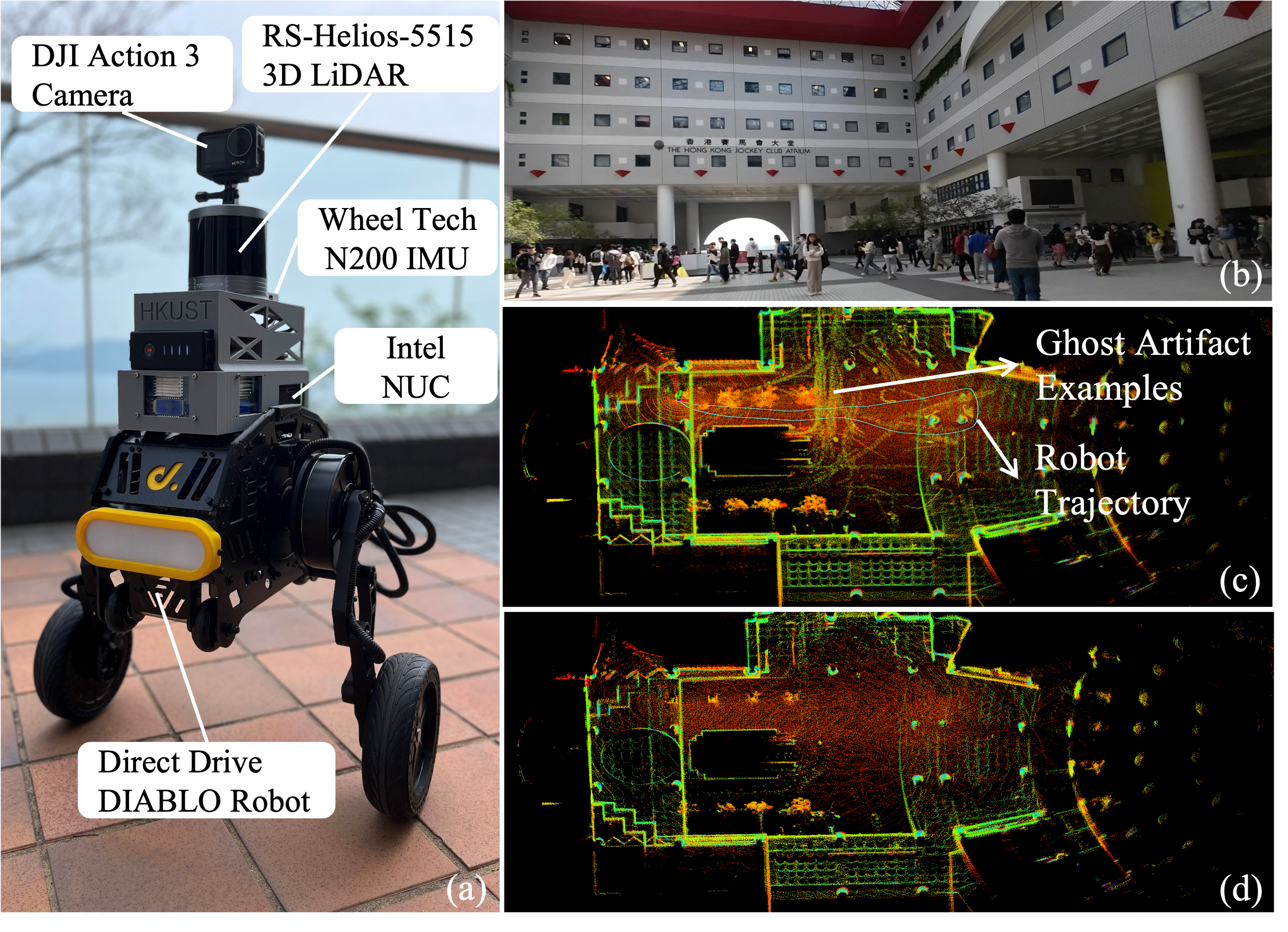
Peg-in-hole Manipulation
[2021.10-2022.09] -IEEE International Conference on Robotics and Automation(ICRA),2023 [paper] -IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS),2023 [paper] |
|
Joggling manipulation: Tossing
[2021.05 - 2021.08] -Tencent Robotics-X Bartending Demo: Tossing Part -IEEE Transactions on Robotics (TRO),2024 [paper] |

|
Design and Test of A Novel Mobile Manipulator
[2021.01 - 2021.05] |
|
Nonprehensile Manipulation: Ball Balancing
[2020.07-2020.10] |
|
Design and Test of A Novel Modular Force Control Manipulator
[2020.02 - 2020.07] |
|
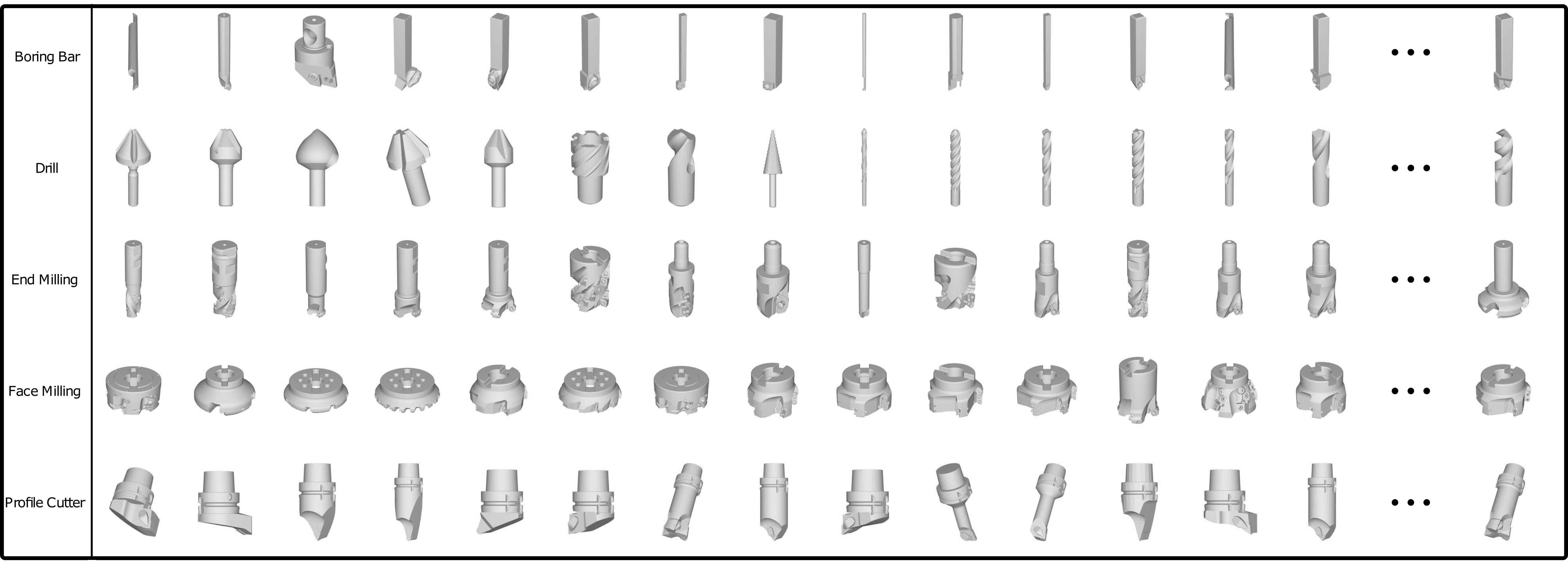
Machine Tools Recognition System
[2016.10 - 2018.10] -International Conference on Extreme Learning Machine(ELM),2018 [paper] -Cognitive Computation,2018 [paper] -IEEE Access,2020 [paper] |
|
Intelligent Energy-saving Automatic Closing Device for Refrigerators
[2014.10 - 2015.05] National innovation and entrepreneurship training program for college students [Patent] [Paper] |

© ZK. All rights reserved